Ce merveilleux jouet de mon enfance va etre le coeur d'un projet de robot
animé par ordinateur lui meme relié à internet.
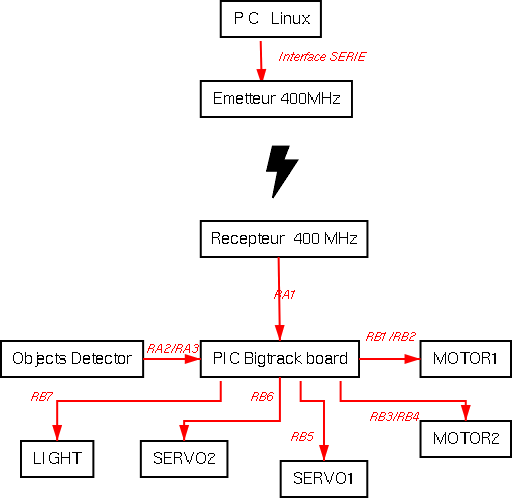
Fig 1: Diagramme de la partie électronique
La carte de commande relié à un port RS232 du PC est une simple interface
vers un module émetteur radio AUREL ou
TELECONTROLLI
.
La carte embarquée est à base du microcontroleur de chez
microchip
, un PIC16F84. Le programme peut tres bien s'adapter sur tout autre type
de microcontroleur.
Les moteurs du bigtrak sont pilotés chacun par 4 MOS de puissance IRF510/IRF9510
pour gérer les deux sens de rotation ainsi que la vitesse de rotation par
modulation PWM en approche d'un obstacle ou démarrage arret du robot.
Un des servos permet à une petite camera CCD de voir sous tout les angles
pendant le fonctionnement du robot.
La sortie LIGHT (RB7) pourra etre relié à une batterie de diode infrarouge
pour aider à la vision pendant les deplacements nocturne.
Le détecteur d'objet est de type infrarouge et son rayon d'action est
entre 2 et 30cm. Il permettra au robot d'éviter des obstacles (le vide, mur, chaise,
...) pendant ses déplacements. Plus tard, une fonction d'évitement d'objet
mobile sera ajoutée.
[SCHEMA.JPG]
Fig 2: Schéma electrique de la partie embarquée
[CIRCUIT.PNG]
Fig 3: Circuit imprime simple face
[BIGTRACK.ASM]
Fig 4: Le programme du pic16f84
[HTML.PNG]
Fig 5: L'interface html de commande et de vision
[bigtrak.cgi]
Fig 6: Le module perl de commande